概述
有100亿个无符号整型数据,给定一个 数据,如何判断这个数据是否在这个100亿个数据中。
有人说可以进行排序,再进行遍历或二分查找;这里先不谈算法效率的问题,这100亿数据如何在能否在内存中放下也是一个问题。
如果用int类型来存储这100亿个数据,那么就需要 100亿 * 4字节 = 37GB ≈ 40GB
所以这些方法行不通的根本原因实际上是内存不够。
位图
实际上只需要判断数据是否存在,可以使用0表示存在,1表示不存在。那么在程序中,就可以使用最小的单位bit来进行表示,1个bit就有两种取值:0和1。所以位图其实就是一种直接定址法的哈希,只不过位图只能表示这个值在或者不在。
假设目前数字25存在,那么就可以直接把第25位 置为1。其他为0的则表示不存在这个数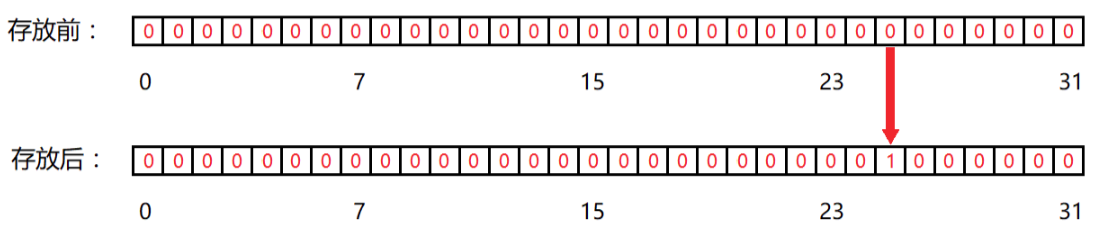
那么现在存储100亿个数据就需要 100亿 * 1bit = 1.2GB
位图的缺点
- 位图存储的元素大小受限于存储空间的大小。比如,1K 字节内存,能存储 8K 个值 且大小上限为 8K 的元素
- 比如,要存储 值为 65535 的数,就需要8Kb的内存。这就有可能导致大量的内存浪费。也就是说,在数据比较稠密的情况下,位图算法能够节约存储空间,但是如果数据稀疏且值较大,存储空间同样会存在一定程度的浪费。基于此,就提出了位图的改进版 - 稀疏位图
- 不能存储真实数据值,即只能判断数据存在不存在,且只适用于整数型数据。如果判断字符串以及其他类型数据存在与否,此时就可以使用布隆过滤器
- Bitmap 在数据稀疏、范围过大但实际存在的值很少的场景下,会很浪费空间
稀疏位图
如果用 Bitmap 来存储 100 个用户 ID,但是这个 ID 的范围很大,此时就会很浪费空间。
Bitmap 的本质是“用一个二进制位标记一个数值是否存在”假设要存储用户 ID,若用户 ID 范围是[1,18^9],则 Bitmap 需要 10^9 个二进制位,大概占用 119MB内存.。即使就存了2个用户,其中一个用户的ID是1,另一个用户的D是 10^9,这样一来 119MB 中99.99%的位都是0(空闲位),空间被严重浪费。

解决的方法可以用 RoaringBitmap 压缩位图结构来实现,这个结构通过分块存储+压缩算法对稀疏数据进行压缩,比如将连续的0或者相邻位合并存储。
RoaringBitmap的核心思想就是,将32位无符号整数按照高16位分桶,即最多可能有 2^16=65536 个桶,高16位的值作为其桶的索引,每个桶对应一个容器container。存储数据时,按照数据的高16位找到container(找不到就会新建一个),再将低16位放入container中。也就是说,Roaring将Bitmap从一层的连续存储,转换为一个二级的存储结构
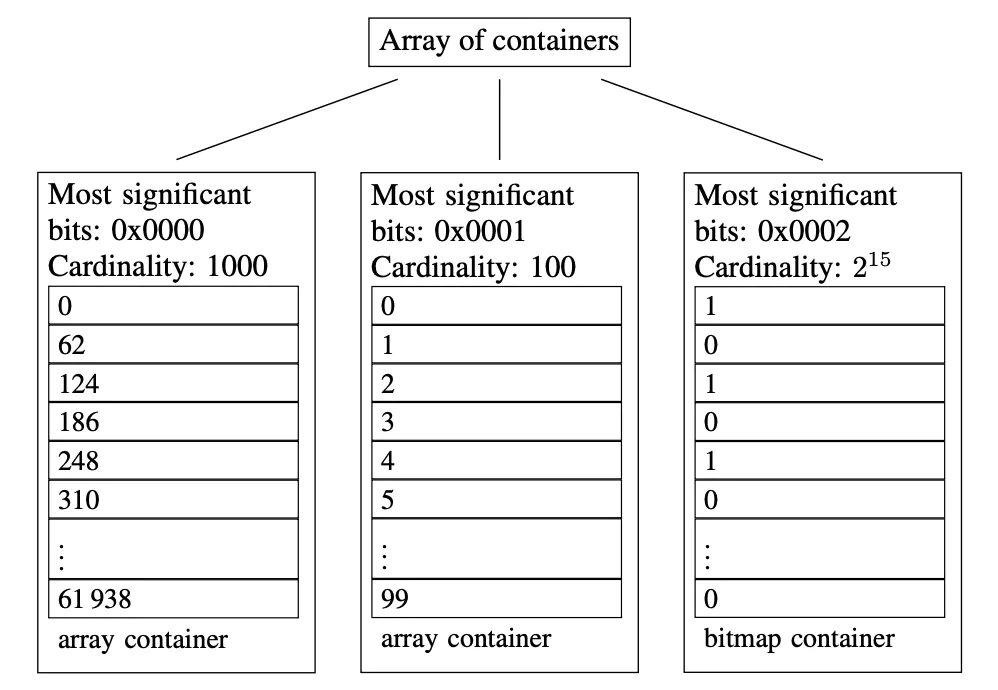
图中示例(这只是例子):
- 高16位为0000H的container,存储有前1000个62的倍数。
- 高16位为0001H的container,存储有[2^16, 2^16+100)区间内的100个数。
- 高16位为0002H的container,存储有[2×2^16, 3×2^16)区间内的所有偶数,共215个。
实际上,container容器的结构有三种类型:有序数组、未压缩位图、和行程长度编码。
- 区间内数据较多,且分布零散,则选择(未压缩)位图。当低16位中,元素个数大于4096时,则使用(未压缩)位图
- 区间内数据较少,且分布零散,则选择使用有序数组。当低16位中,元素个数小于4096时,采用有序数组的结构进行存储。在查找元素时,使用二分查找方法。
- 区间内数据连续分布,则选择用Run Length Encoding编码。行程长度编码是一种无损数据压缩技术,其原理是,将连续出现的数据存储为起始值和计算两部分。比如,数据列表[1,2,3,4,5,6]存储为[1,5],表示以1开始,后面连续递增5个数值。
在进行插入和删除操作之后,需要根据元素个数进行容器转换。插入元素时,若元素个数达到4096,则需要转换为未压缩位图进行存储。删除元素时,若元素个数小于4096时,则需要转换为有序数组存储。
那么这里为什么阈值选择的是4096呢?
论文中提到,由于container中只需要存储低16位的数,那么数组存储的时候是使用2字节即16 bit的short类型存储的,那么数组中存一个数字就是2字节,存4096个数字就是 8KB
而当需要存储的数字大于4096个数后,可以使用2^16 bit 的位图来存储,2^16 bit 的位图的存储空间恒等于8KB,有某一个数字,就把那个位置为1,没有就置为0
如下图所示,显然当元素个数小于4096时,占用空间就是 元素个数 * 2B < 8KB;当元素个数大于4096时,占用空间就是8KB

Roaring 提供O(logn)的查找性能:
- 首先二分查找key值的高16位是否在分片(chunk)中
- 如果分片存在,则查找分片对应的Container是否存在
- 如果Bitmap Container,查找性能是O(1)
- 其它两种Container,需要进行二分查找
因此RoaringBitMap尽量节省空间,但也同时影响了效率,相当于时间换空间。
相关论文:
- 《Better bitmap performance with Roaring bitmaps》
- 《Consistently faster and smaller compressed bitmaps with Roaring》